
物を掴まずに動かすことのできる革新的なデバイスが開発された。ノースカロライナ州立大学の研究チームは、磁場と切り紙の設計原理を組み合わせることで、柔軟な凹凸面を遠隔制御し、物体を把持せずに操作できる装置の開発に成功した。この技術は、ロボットアームなどの従来型の機械的な把持装置が使用できない狭い空間での応用が期待されている。
磁性と切り紙の融合による画期的なアプローチ
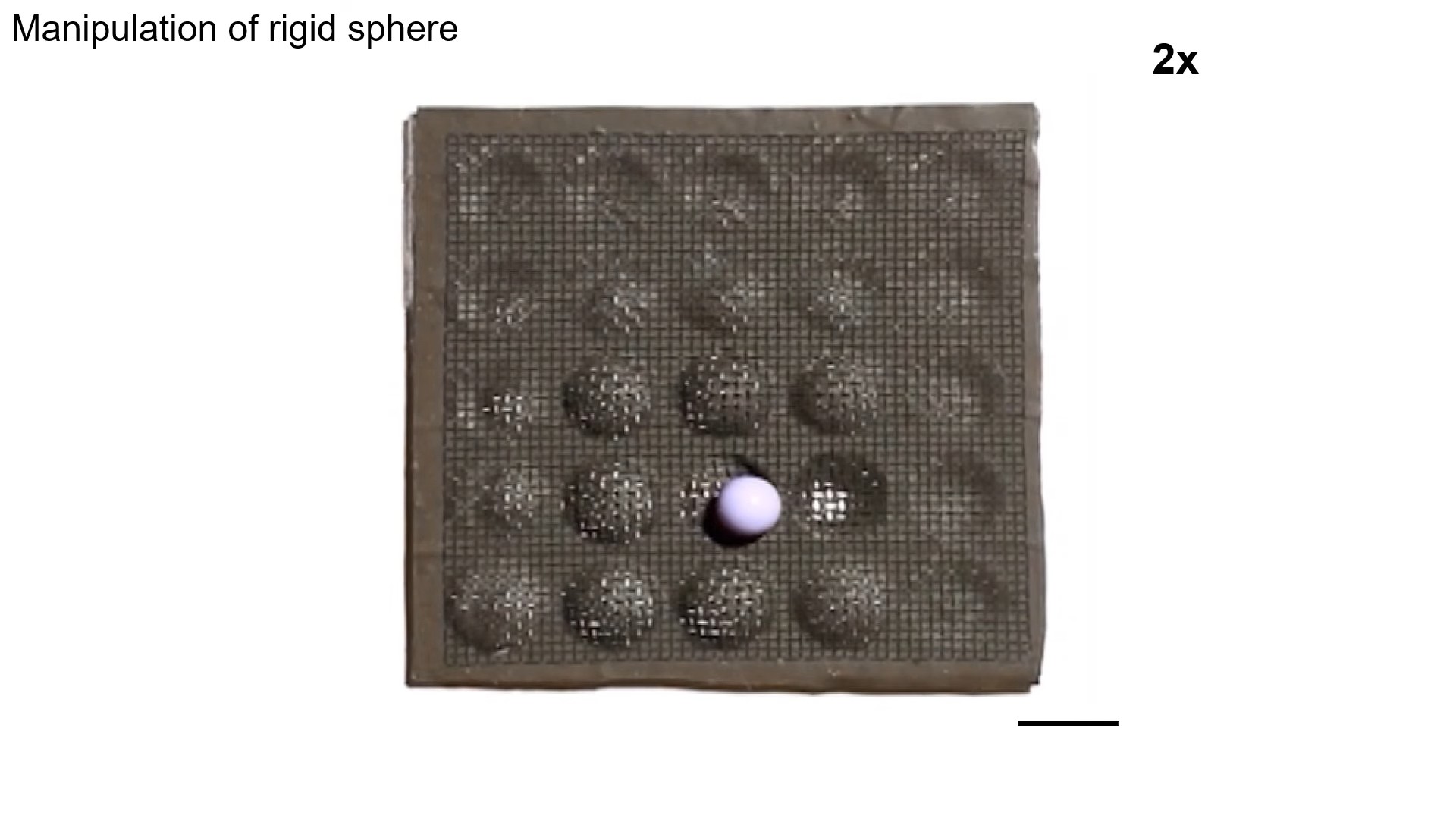
研究チームが開発した「メタシート」の革新性は、磁性と切り紙という2つの技術を巧みに組み合わせた点にある。基盤となる素材は弾性ポリマーであり、その中に磁性微粒子が均一に埋め込まれている。この構造により、外部からの磁場に応じてシート全体が柔軟に変形できる特性を持つ。
特に注目すべきは、表面に施された切り紙パターンの設計だ。研究チームは伝統的な日本の切り紙技法から着想を得て、テッセレーション(敷き詰め模様)状の三角形パターンをシートに刻んでいる。このパターンには重要な工学的意義がある。通常、材料の柔軟性を高めようとすると構造的強度が低下するというトレードオフの関係が生じる。しかし、切り紙パターンを採用することで、材料本来の剛性を維持したまま、局所的な変形のしやすさを大幅に向上させることに成功した。
この技術の動作原理は、物理学的に見ても興味深い。メタシートの下部から磁場をかけると、埋め込まれた磁性微粒子が磁力線に沿って配向しようとする。この際、切り紙パターンによって生まれた構造的な自由度が、シート表面の局所的な隆起や陥没を可能にする。磁場の方向を制御することで、この変形を波のように伝播させることができ、結果として物体を運ぶための推進力が生まれる。
特筆すべきは、このシステムの応答性の高さだ。磁場の変化に対して、わずか2ミリ秒という極めて短い時間で反応する。これは、産業用ロボットの一般的な応答時間と比較しても極めて高速である。この高速応答性は、磁性微粒子の特性と切り紙構造による変形のしやすさが相乗的に作用した結果といえる。
さらに、このメタシートは外縁部を剛性のあるフレームで固定することで、変形の制御性を高めている。この設計により、シート中央部での変形を効果的に引き起こしつつ、全体としての形状安定性を確保することに成功している。これは、実用化に向けて重要な工学的解決策の一つといえるだろう。
多様な応用可能性を秘めた新技術
このメタシート技術がもたらす応用可能性は、従来の産業用ロボットでは対応が困難だった領域に大きく広がっている。特に注目すべきは、繊細な物体や液体の操作能力である。研究チームは、ガラス板や木製プレート、葉っぱ、さらには水滴まで、様々な非磁性物体の移動に成功している。特に液体の操作においては、超撥水性を付与したバージョンのメタシートを用いることで、水滴を精密に制御できることを実証した。
この技術の特筆すべき強みは、物体との接触面における優れた適応性にある。従来の産業用ロボットハンドやグリッパーは、対象物の形状や材質に応じて個別の設計が必要であり、かつ把持力の制御が難しいという課題があった。一方、メタシートは表面の変形によって対象物に合わせた「受け皿」を形成することができ、過度な応力を加えることなく物体を移動させることが可能である。
さらに、この技術は狭隘空間での作業という産業界の重要な課題に対しても、新たな解決策を提示している。従来のロボットアームでは、作業空間の制約から入り込むことができない場所でも、薄型のメタシートであれば設置が可能である。この特性は、半導体製造装置内部での部品搬送や、医療機器内での精密部品の操作など、高度な制御が要求される領域での応用が期待される。
また、このシステムの高速応答性は、生産ラインでの実用化において大きな利点となる。わずか2ミリ秒での応答は、高速な搬送作業や精密な位置決めが必要な工程での活用可能性を示唆している。特に、従来は人手に頼らざるを得なかった繊細な作業において、自動化への道を開く可能性がある。
研究チームは現在、この技術の応用範囲をさらに拡大するため、触覚フィードバック機能の開発にも着手している。これは単なる物体搬送装置としてだけでなく、ヒューマンインターフェース技術としての可能性も示唆している。特にゲーミングやアクセシビリティデバイスへの応用では、メタシートの局所的な変形を利用した触覚刺激の生成が可能となり、新たなユーザー体験の創出につながる可能性がある。
研究チームは現在、この技術のさらなる小型化を目指している。より小さな物体や少量の液体を操作できるようにすることで、応用範囲の拡大を図る計画だ。また、NCステート大学の機械航空工学准教授であるJie Yin氏によれば、ゲームやアクセシビリティデバイスなどの触覚技術への応用も検討されている。
この研究成果は科学誌『Science Advances』に掲載された。従来のロボット工学では対応が難しかった繊細な物体の操作や、狭小空間での作業に新たな可能性を開くものとして、産業界からの注目を集めている。
論文
- Science Advances: Magnetic kirigami dome metasheet with high deformability and stiffness for adaptive dynamic shape-shifting and multimodal manipulation
参考文献
- NC State University: Magnetically Controlled Kirigami Surfaces Move Objects: No Grasping Needed
研究の要旨
ソフトな形状変化材料は、形状制御された特性や機能性において高い適応性を提供する。 しかし、一旦変形すると、その形状を再プログラムし、同時に多機能性を満たすための荷重に耐えるのに苦労する。 ここでは、ダイナミックに変化する磁場に素早く反応し、高い変形性と剛性を持つ、時空間的にダイナミックに形状変化する切り紙ドームメタシートを報告する。 この磁気切り紙ドームは、切れ目のない連続的なものと比較して、2倍以上のドーミング高さと1.5倍以上の曲げ曲率を示し、構造剛性も7倍向上している。 このメタシートは、2ミリ秒以内に変化する磁場に素早く反応し、全方向ドーミングと多峰性の並進・回転波状形状シフトを実現する。 このダイナミックな形状シフトと物体との適応的相互作用を利用して、ボクセル化されたダイナミック・ディスプレイや、非磁性物体の把持を伴わない遠隔磁気多方向・回転操作への応用を実証する。 また、自重の40倍を超える高荷重搬送能力、異なる材料(液体、固体)、サイズ、形状、重量の物体を扱う汎用性を示す。







コメント