

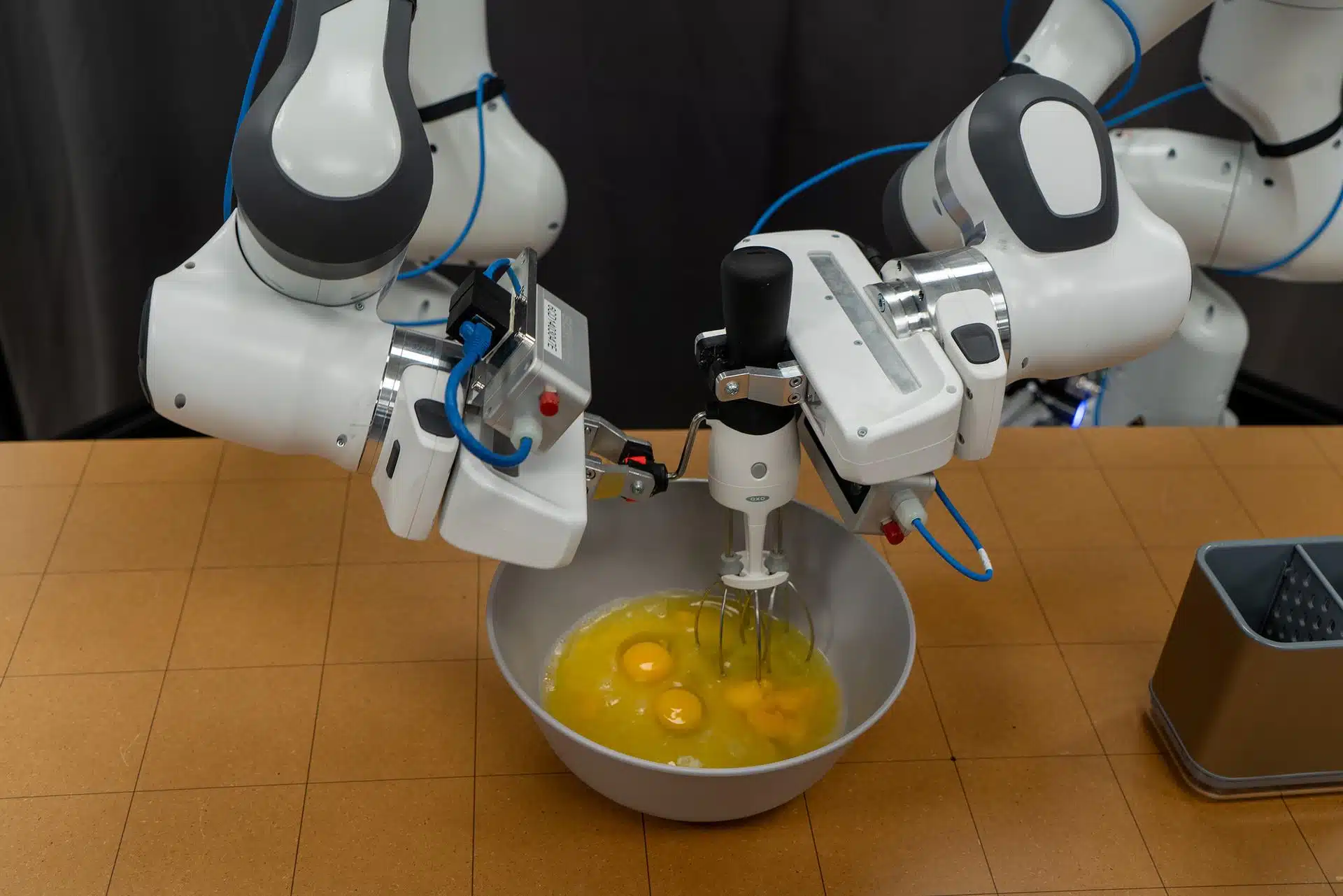
トヨタ自動車のAI研究所であるToyota Research Institute(TRI)は、ロボットに新しい器用なスキルを迅速かつ効率的に教えることを可能にする、画期的な生成AI手法を開発した事を報告している。
人間の能力を向上させる
開発したチームは、この新しいアプローチによってロボットが人間と協力するのに適した存在になることを期待しているという。
TRIのCEOであり、トヨタ自動車のチーフ・サイエンティストであるGill Pratt氏は、「私たちのロボット工学の研究は、人間に取って代わるのではなく、人間の能力を向上させることを目的としています。この新しい教育技術は、非常に効率的であり、また非常に高いパフォーマンスの行動を生み出すので、ロボットは様々な面で、より効果的に人間の能力を向上することができるのです」。
ロボットの教育には、ロボットが特定の仕事を実行したり、異なる環境に適応したりするためのデータやスキルを与えることが含まれる。これは、従来のプログラミングから機械学習や人工知能のような高度なアプローチまで、さまざまな技術を含む学際的な分野である。
しかし、ロボットに新しい行動を教えるための最新の手法は、多くの時間を要し、ほとんど効果がなく、厳しい制約のある環境で実施される特別に定義された活動に限定されることが多かった。ロボットの行動を正確に指定するコードを記述するような方法は、柔軟性を必要としない明確に定義された仕事には適していたが、日常的な場面で機械が機能するために必要な、より複雑な仕事をロボットが引き受けることは制限されていた。
TRIが開発したロボットの行動モデルは、目標を音声で説明するだけでなく、触覚による教師のデモンストレーションを通じて学習する。この方法によって、多数のデモから推測される新しい行動の独立した導入が可能になる。このアプローチは、信頼性が高く、再現可能で、効率的な結果をもたらすだけでなく、非常に迅速にこれを行うことが出来るという。
Diffusion Policy
TRIがトヨタがコロンビア大学工学部、MITと共同で開発したコンセプトである「Diffusion Policy」が、今回の成果に活かされている。Diffusion Policyについては、詳しくはこちらをご覧頂きたい。
基本的には、ChatGPTのような大規模言語モデル(LLM)が、何十億語もの人間の文章を取り込み、人間に驚くほど近いレベルで、文章を書いたり、コードを書いたり、さらには推論したりすることを自分自身に教えることができるのに対し、Diffusion Policyは、ロボットAIが、現実世界で人間がどのように物理的なタスクを行うかを観察し、そのタスクを柔軟な方法で実行するように自分自身を本質的にプログラムすることを可能にするのだ。
多様な器用さ
TRIのロボット研究担当副社長であり、マサチューセッツ工科大学(MIT)の電気工学・コンピューターサイエンス、航空宇宙学、機械工学の教授でもあるRuss Tedrake氏は、「これらのロボットが実行するタスクは、本当に驚くべきものです。この新しいアプローチで非常にエキサイティングなのは、新しいスキルを追加できる速度と信頼性です。これらのスキルは、学習された表現のみを使用して、カメラ画像と触覚センシングから直接動作するため、変形可能な物体、布、液体を含むタスクでもうまく動作することができます。- これらはすべて、従来ロボットにとって非常に困難であったものです」と、この成果の意義を強調する。
TRIはすでにこの新たな手法を使って、新しいコードを一行も作成することなく、新しい情報をロボットに与えるだけで、60以上の複雑で器用な能力をロボットに教えている。TRIは現在、2024年末までにロボットに1,000の新しいスキルを教えたいと考えており、複雑で多様な方法で世界と関わるこの新しく獲得された能力によって、ロボットはいつの日か、より予測不可能な現実的な状況で人々をサポートできるようになると予測している。そのため、TRIは最初のLarge Behavior Model(LBM)、つまり最終的にはChatGPTに相当する具現化されたロボットのようなものに拡張されるフレームワークになると考えているものを開発している。

ロボット工学、機械学習、人工知能の進歩は絶えず行われており、ロボットの教育は進化し続けるダイナミックな分野である。ロボットは、困難なタスクの管理やチームでの人間との共同作業がますます得意になり、さまざまな産業で人間とともに働くのに適していくことだろう。
Sources







コメント