
カリフォルニア大学サンタバーバラ校(UCSB)とドレスデン工科大学の研究チームは、液体のように流れたり鋼のように硬化したりと状態を自在に変化させる革新的なロボット集合体を開発した。生物の胚発生過程からインスピレーションを得たこの技術は、自己修復能力や形状変化能力を備え、未来の「プログラマブルマター」実現への大きな一歩となる可能性がある。
液体と固体の性質を兼ね備えた革新的ロボット材料
UCSBのElliot Hawkes教授の研究室で博士研究員を務めたMatthew Devlin氏を筆頭著者とする研究チームは、個々のロボットが協調して動作することで、全体として材料のように振る舞う新しいタイプのロボットシステムを開発した。この研究は2025年2月20日に科学誌『Science』に掲載された。
「私たちはロボットがより材料のように振る舞う方法を発見しました」とDevlin氏は述べている。このシステムは、小型のホッケーパックのような円盤状の自律型ロボットで構成されており、プログラムによってさまざまな形状や異なる材料強度を持つ構造に自己組織化することができる。
研究チームが取り組んだ最大の課題の一つは、剛性と強度を持ちながらも新しい形状に流動できるロボット材料の作成だった。「ロボット材料は形状を保持できると同時に、選択的に自らを新しい形状に流動させることができるべきです」とHawkes教授は説明している。
生物の胚発生からインスピレーションを得た技術
この革新的な技術開発のインスピレーション源となったのは、生命の神秘とも言える、生物の胚発生過程だ。研究チームは、かつてUCSBで教鞭を執り、現在はドレスデン工科大学のPhysics of Life Excellence Clusterのディレクターを務めるOtger Campàs教授の研究を参考にした。
「生きた胚組織は究極のスマート材料です」とCampàs教授は述べている。「それらは自己形成、自己修復の能力を持ち、さらに空間的・時間的に材料強度をコントロールすることができます。」Campàs教授の研究室は以前、胚がガラスのように一時的に軟化して最終的な形を作り上げることを発見していた。
胚の発生過程において、細胞は互いに配置を変え、未分化な細胞の塊から手足のような個別の形態や、骨や脳のようなさまざまな硬さを持つ組織へと変化していく。研究チームは、この「剛性遷移」と呼ばれる現象の背後にある3つの生物学的プロセスの再現に焦点を当てた:
- 細胞間の能動的な力の伝達(細胞が互いに動き回ることを可能にする)
- 空間的・時間的に動きを調整する生化学的シグナル伝達
- 細胞間の接着能力(最終的な形態の剛性をもたらす)
磁石とモーター:形状変化を可能にする鍵
ロボットの世界では、細胞間接着に相当するのが磁石による結合だ。ロボットユニットの周囲に組み込まれた磁石によって、ロボット同士が互いに結合し、全体として剛性のある材料のように振る舞うことができる。
細胞間力に相当するのは、各ロボットの円形外装に取り付けられた8つのモーター駆動ギアによって生み出される接線力だ。ロボット間のこれらの力を調整することで、研究チームは完全に固定され剛性のある集合体を柔軟に形状変化させることに成功した。
生化学的シグナル伝達に相当するのは、いわば全体座標系だ。「各細胞は頭と尾を『知っている』ので、どの方向に力を加えるべきかを理解しています」とHawkes教授は説明する。このように細胞の集合体は組織の形を変えることができる。
ロボットでは、これを偏光フィルター付きの光センサーで実現している。これらのセンサーに光が当たると、光の偏光方向によってギアをどの方向に回転させるか、つまりどのように形状を変えるかが決まる。「一定の光場の下で、一度にすべてのロボットにどの方向に進むべきかを伝えることができ、それらは整列して必要な動作を行うことができます」とDevlin氏は付け加えた。
信号変動の重要性とエネルギー効率
研究チームは、ロボットへの信号変動(fluctuations)が形状形成と形態変化において重要な役割を果たすことを発見した。「我々は以前、生きた胚において、細胞が生成する力の変動が固体のような組織を流体に変える鍵であることを示しました。そこで、ロボットにも力の変動をプログラムしました」とCampàs教授は述べている。
ロボット集合体において、信号変動と単位間力の相互作用は、硬く動かない集合体と流動的な集合体の違いを生み出す。「基本的に、両方、特に変動を増加させると、より流動的な材料が得られます」とDevlin氏は説明する。これにより、集合体は形状を変化させることができる。一度形成されると、力の変動をオフにすることで集合体を再び硬化させることができるのだ。
重要なことに、これらの信号変動により、信号が常にオンでロボットが連続的に互いに押し合う場合よりも少ない平均電力で形状と強度の変化を達成できることが分かった。「これは我々が探し求めていたわけではないが、ロボットの動作データを収集し始めてから発見した興味深い結果です」とHawkes教授は述べている。これは限られた電力予算で動作しなければならないロボットの設計において重要だと付け加えた。
実証された能力と耐久性
研究チームはロボット集合体を200時間以上のテストと特性評価にかけ、集合体のモーターの28%が故障していても正常に機能するほど堅牢であることを発見した。
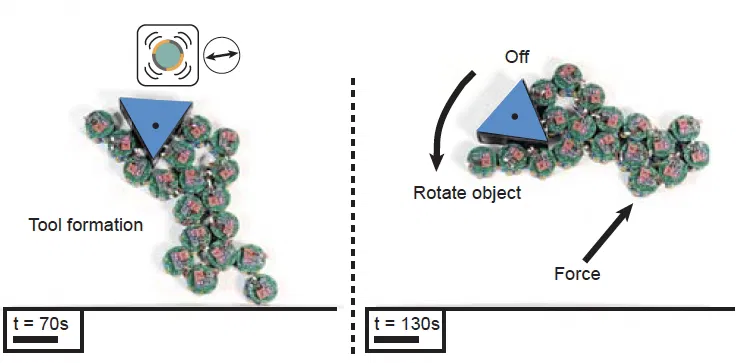
実演では、ロボットが別々の柱から安定した荷重支持アーチに変形した。その初期形成だけでなく、集合体は構造的欠陥を修復し、物体を動かす力を加えることもできた。物体を操作する別の例では、システムは物体の周りを流れてレンチの形に固まり、トルクを加えることができた。
テストでは実用的なスケールでの使用も実証され、ロボットユニットは人間と同等のサイズの配置に達した後、流体状態に移行することができた。
将来展望と潜在的応用
現在のプロトタイプは20個の比較的大きなユニットで構成されているが、Campàs研究室の元ポスドク研究員で現在はEPFLの助教授であるSangwoo Kim氏によるシミュレーションでは、このシステムは小型化して多数のユニットに拡張できることが示されている。
これにより、数千のユニットからなるロボット材料の開発が可能となり、無数の形状を取ることができ、物理的特性を自在に調整できる、今日の物体の概念を変えるようなものになる可能性がある。
ロボット工学を超えた応用として、物理学における活性物質の相転移の研究や、粒子系における活性力学の特性の調査、そして生物学研究のための仮説の定義に役立つ可能性がある。機械学習戦略と組み合わせることで、ロボット材料においてまだ発見・理解されていない創発的能力をもたらす可能性もある。
論文
参考文献
- UC Santa Barbara: How to Get a Robot Collective to Act Like a Smart Material






コメント