2025年12月、人類の宇宙探査史において極めて静かでありながら、決定的な転換点となる出来事が火星のジェゼロ・クレーターで発生した。NASA(アメリカ航空宇宙局)の探査車「Perseverance(パーサヴィアランス)」が、地球から送信された「AIが全行程を設計した走行指令」に基づき、複雑な岩場と砂地を縫って合計約400メートルを完走したのである。
この指令を作成したのは、NASAの熟練エンジニアではない。Anthropic社が開発した大規模言語モデル(LLM)、「Claude」である。
NASAジェット推進研究所(JPL)が実施したこの歴史的な実証実験の成功は、将来の深宇宙探査やNASAの組織構造にどのような変革をもたらすのだろうか。
歴史的走行の全貌:Sol 1707と1709の出来事
火星と地球の距離は平均して約2億2500万キロメートル離れており、光の速さでも通信には片道で4分から24分、往復で最大48分もの遅延(レイテンシ)が発生する。そのため、地球からの「リアルタイム操縦(ジョイスティック操作)」は物理的に不可能であり、探査車は事前に送信されたコマンドに従って自律的に動くか、少し進んでは止まり確認を待つという遅々とした歩みを余儀なくされてきた。
しかし、2025年12月8日と10日(火星日:Sol 1707およびSol 1709)に行われたミッションは、これまでの常識を覆すものであった。
AIが描いた「パンくずの道」
JPLの運用チームは、パーサヴィアランスのナビゲーション計画において、従来の人間による手動設計プロセスを生成AIに委譲する実験を行った。
- 12月8日(Sol 1707): Claudeが生成したコマンドに基づき、探査車は210メートル(689フィート)を走行。
- 12月10日(Sol 1709): 続いて246メートル(807フィート)を走行。
この2日間で、パーサヴィアランスはAIが計画したルートに沿って、ジェゼロ・クレーターの複雑な地形を約456メートル走破することに成功したのである。これは陸上競技トラックの1周分に相当する距離であり、決して平坦ではない火星表面においては極めて野心的な距離設定であった。
ブラックボックスを開く:AIによるルート生成のメカニズム
単に「AIに命令させた」という表現では、このプロジェクトの技術的な重要性は見えてこない。Claudeがどのようにして物理世界の、それも地球外惑星のナビゲーションを行ったのか、そのプロセスを見てみよう。
視覚と言語の融合(Vision-Language Model)
JPLのエンジニアチームは、以下のデータをClaudeに入力した。
- 高解像度軌道画像: 火星周回機マーズ・リコナイサンス・オービター(MRO)に搭載されたHiRISEカメラが撮影した、地表の詳細な俯瞰画像。
- 地形勾配データ(Digital Elevation Models): 斜面の角度や起伏を示す数値モデル。
- 過去の走行データ: 長年の運用で培われた「安全なルート」と「危険なルート」のコンテキスト。
Claudeは、その高度な視覚認識能力(Vision Capabilities)を用いてこれらの画像を解析。岩盤(bedrock)、露頭(outcrops)、危険な巨岩群(boulder fields)、そしてタイヤが埋まるリスクのある砂紋(sand ripples)といった地形的特徴を正確に識別した。
RML(Rover Markup Language)の記述
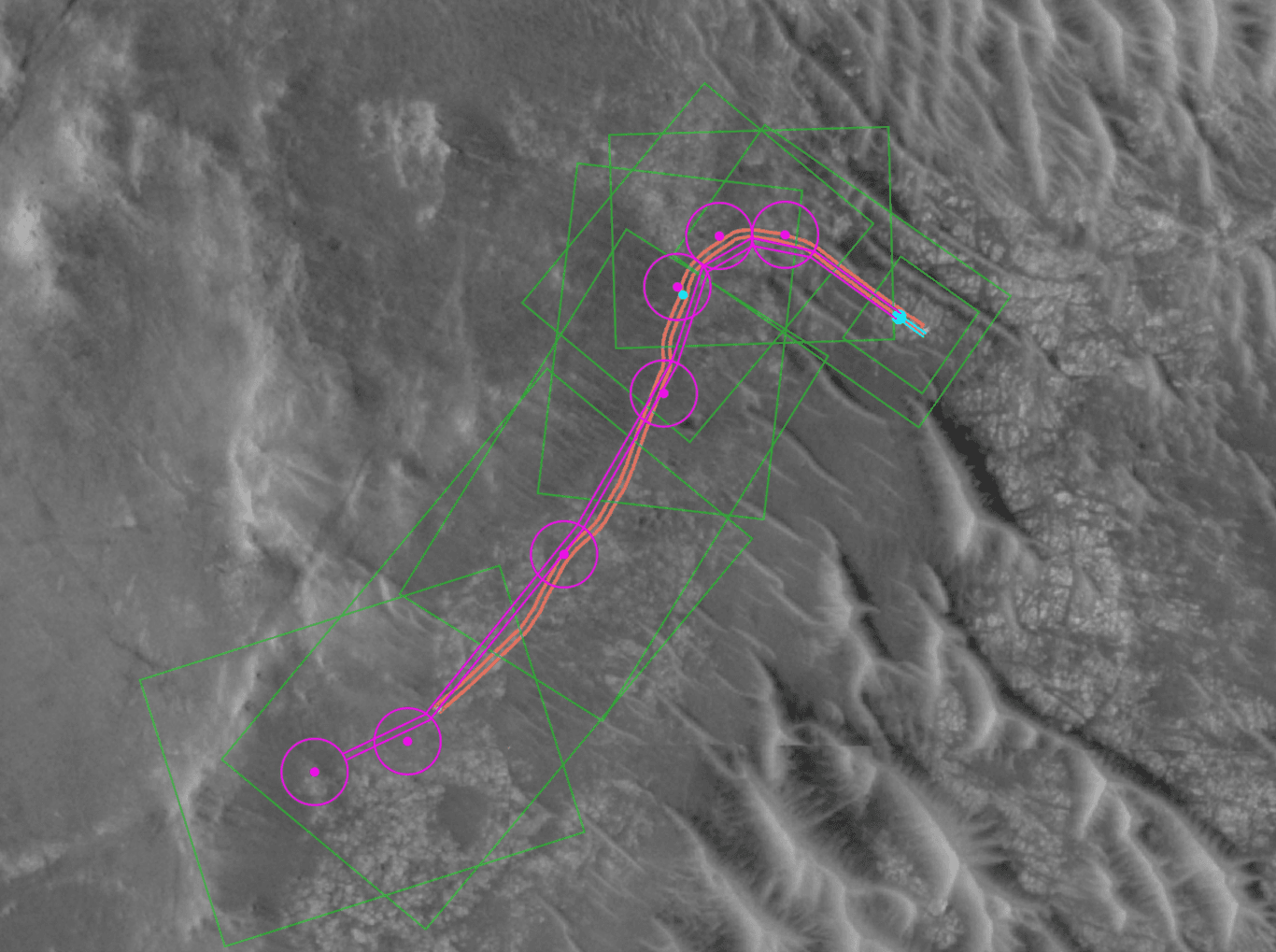
特筆すべきは、Claudeが単に「右へ」「左へ」といった曖昧な指示を出したわけではない点だ。AIは解析結果に基づき、Rover Markup Language (RML) と呼ばれる、XMLベースの探査車専用プログラミング言語で直接コマンドコードを生成した。
これは、かつて火星探査車「スピリット」や「オポチュニティ」のミッションのために開発された特殊な言語体系である。Claudeは、数メートルごとのウェイポイント(経由地点)を結びつけ、安全かつ効率的な連続ルートを描き出した。これをエンジニアたちは「パンくずの道(breadcrumb trail)」と呼ぶ。
安全性の防壁:50万変数の「デジタルツイン」検証
生成AIには常に「ハルシネーション(もっともらしい嘘)」のリスクがつきまとう。27億ドル(約4000億円)以上の価値がある国家資産であるパーサヴィアランスを、AIの誤判断で崖から転落させたり、砂地にスタックさせて2009年の探査車スピリットのように「永久不動」にさせたりすることは許されない。
ここで、JPLが構築した「多層的安全性検証システム」が重要となる。
シミュレーションによる徹底的なスクリーニング
Claudeが生成したRMLコードは、そのまま火星へ送信されたわけではない。JPLは、パーサヴィアランスの完全な仮想モデルである「デジタルツイン(Digital Twin)」を用いて、AIの計画をシミュレーション環境下で実行させた。
このプロセスにおいて、JPLは50万以上のテレメトリ変数(探査車の姿勢、車輪のトラクション、電力消費、熱制御など)をモニタリングし、AIが提案したルートが物理的に実行可能であり、かつ安全基準を満たしているかを厳密に検証した。
人間とAIの協調(Human-in-the-loop)
シミュレーションの結果、Claudeの計画は驚くほど正確であったが、完璧ではなかった。JPLのエンジニアによるレビューにおいて、軌道画像からは見えにくい微細な砂紋のリスクが地上レベルの画像データ(AI未入力)から判明した箇所については、人間が微調整を加えた。
これは、「AIへの完全な権限委譲」ではなく、「AIによる能力拡張と人間による監督」という、最も現実的かつ安全な運用モデルの成功例と言える。
「50%の時短」が意味するもの:NASAの組織戦略と未来
なぜNASAは、これほどのリスクを冒してまでAI導入を急ぐのか。その背景には、切実な実用的・組織的理由が存在する。
運用テンポの劇的な向上
従来、火星でのルート計画は、地形分析官、軌道計画者、安全性エンジニアなど多数の専門家が、衛星画像を凝視しながら数日かけて行う重労働であった。
AnthropicとJPLの推計によれば、Claudeを用いたこの新しいワークフローは、ルート計画に要する時間を50%削減できるという。これは単なる工数削減ではない。削減された時間は、探査車をより頻繁に動かし、より多くの科学データを収集し、より高度な分析を行うための「科学的価値の創出」に再投資される。
予算制約と労働力の再定義
2025年、NASAは厳しい予算削減と人員削減(JPLだけで数百名規模のレイオフ)に直面している。限られたリソースの中で、月面探査「アルテミス計画」や火星サンプルリターンなどの野心的な目標を達成するためには、生産性の飛躍的な向上が不可欠である。
JPLの宇宙ロボット工学者であるVandi Verma氏が指摘するように、AIが「パンくずリスト」の作成という反復的作業を肩代わりすることで、人間の専門家は「どの岩石を調査すべきか」「この地質学的特徴は何を意味するのか」といった、より高度な科学的判断に集中できるようになる。これは、AIによる労働の代替ではなく、専門性の高度化である。
深宇宙への架け橋:ジェゼロからエウロパ、タイタンへ
今回の400メートルの走行は、単なる「火星でのドライブ」以上の意味を持つ。これは、人類が太陽系をより深く探索するための布石である。
通信遅延の壁を越えて
火星より遠く、木星の衛星エウロパや土星の衛星タイタンといった「オーシャン・ワールド」への探査では、通信遅延は数時間に達する。そこでは、地球からの指示を待つことは致命的なタイムロスを意味する。探査機は、未知の環境下で、自ら状況を判断し、行動を決定しなければならない。
今回の実証実験で示された、「未知の地形を認識し、自己位置を特定し、安全な経路を計画・実行する」という一連のAI自律機能は、将来の深宇宙探査機に搭載される「頭脳」のプロトタイプである。
キロメートル級の自律走行へ
JPLの探査システムオフィス・マネージャーであるMatt Wallace氏は、この技術が将来的に「キロメートル単位の自律走行」を可能にし、月面基地建設や有人火星探査に必要なインフラ構築の基盤となると述べている。
現在、パーサヴィアランスは生命の痕跡を探す旅を続けているが、その「運転手」の一人としてAIが加わったことで、探査のスピードと深度はかつてないレベルに達しようとしている。我々は今、探査機が単なる「遠隔操作ロボット」から、真の「自律的探検家」へと進化する瞬間に立ち会っているのである。
Sources
- Jet Propulsion Laboratory: NASA’s Perseverance Rover Completes First AI-Planned Drive on Mars
- Anthropic: FOUR HUNDRED METERS on MARS