未来の医療現場では、AIがメスを握る時代が来るのか──。ジョンズ・ホプキンズ大学の研究チームが開発した最新のAI搭載自律型手術ロボット「SRT-H(Surgical Robot Transformer-Hierarchy)」が、豚の臓器を使った胆嚢摘出手術において、驚くべき100%の成功率を達成し、その可能性を現実のものとした。
従来の遠隔操作型ロボットとは一線を画し、SRT-Hは手術中に自律的な判断を下し、予期せぬ状況にも適応する能力を実証した。これは、世界的な外科医不足や医療アクセスの地域格差といった現代医療が抱える喫緊の課題に対し、強力な解決策を提示する画期的な一歩となるかも知れない。
「AI外科医」誕生の瞬間:100%の成功が証明したもの
2025年7月9日、科学誌『Science Robotics』に掲載された論文は、世界に衝撃を与えた。ジョンズ・ホプキンズ大学、スタンフォード大学などの研究者からなるチームが、AIロボットによる完全自律手術の成功を報告したのである。
この実験で主役となったのは、「SRT-H (Surgical Robot Transformer-Hierarchy)」と名付けられたシステムだ。
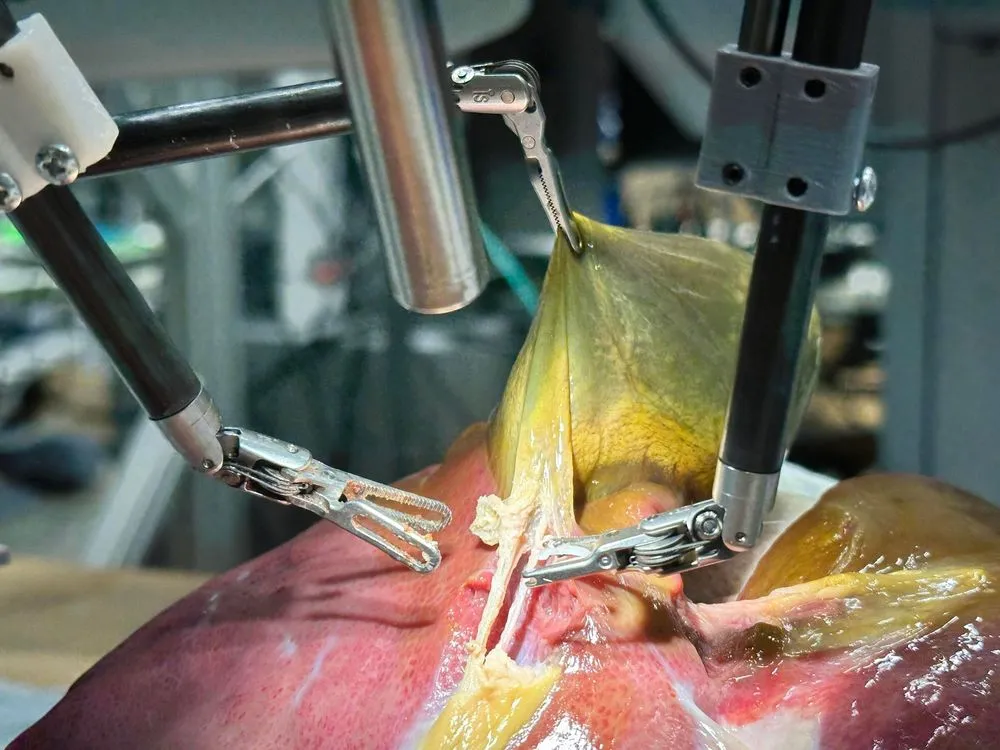
実験の舞台:リアルを追求した豚の臓器
実験は、人間の手術環境を忠実に再現するため、摘出された豚の胆嚢と肝臓を用いて行われた。豚の臓器は、血管の配置や組織の多様性において人間と酷似しており、実際の外科手術で遭遇するような個体差や予測不能な状況をシミュレートするのに最適だった。研究チームは、それぞれ異なる解剖学的特徴を持つ8つの臓器セットを用意し、SRT-Hの適応能力を試した。
17の複雑なステップを自律的に完遂
胆嚢摘出手術は、繊細かつ正確な手技が要求される。今回の実験でSRT-Hに課せられたタスクは、全部で17のステップから構成される。これには、以下のような高度な判断と操作が含まれる。
- 組織の特定と把持: 胆嚢管や胆嚢動脈といった特定の管状構造を正確に認識し、鉗子(かんし)で優しくつかむ。
- クリッピング: 切断後の出血や胆汁の漏出を防ぐため、6つの医療用クリップを正確な順序と位置に装着する。
- 切断: クリップとクリップの間を、周囲の組織を傷つけることなくハサミで正確に切断する。
これらのタスクを、SRT-Hは人間の介入なしに、自らの「判断」で実行した。そして、8回行われたすべての手術において、完璧な成功を収めたのである。
驚異の自己修正能力
SRT-Hの真価は、100%という成功率だけではない。論文によれば、手術中に平均で6回もの自己修正を行ったという。これは、あらかじめプログラムされた動きをなぞるだけではないことの証明だ。例えば、鉗子が対象からわずかにずれた場合、SRT-Hはそれを自ら認識し、正しい位置へと軌道を修正する。このリアルタイムでの適応能力こそ、自律手術を実現する上での最も重要な鍵となる。
ジョンズ・ホプキンズ大学の医用ロボット工学者であり、研究を率いたAxel Krieger准教授は、「この進歩は、特定の外科的タスクを実行できるロボットから、外科手術そのものを真に理解するロボットへの移行を意味します」と語る。「これは、実際の患者ケアという混沌とし、予測不可能な現実の中で機能できる、臨床的に実行可能な自律型手術システムに我々を大きく近づける、極めて重要な区別なのです」。
SRT-Hを支える革新技術:なぜ「自律手術」は可能になったのか?
では、なぜSRT-Hはこれほど高度な自律性を獲得できたのか。その秘密は、その名前に隠された革新的なAIアーキテクチャにある。
「見て学ぶ」模倣学習:熟練外科医の技術をAIに移植
SRT-Hの学習方法は、人間、特に外科研修医が技術を習得するプロセスに似ている。研究チームは、熟練の外科医が豚の臓器を使って胆嚢摘出手術を行う様子を撮影した大量のビデオ映像をAIに学習させた。映像には、各ステップで何が行われているかを説明する言語の注釈(キャプション)が付与されている。
AIは、この「映像(お手本)」と「言語(説明)」のペアから、「この状況では、次はこのように動くべきだ」というパターンを学習する。これは模倣学習(Imitation Learning) と呼ばれる手法で、熟練外科医の持つ暗黙知、すなわち“匠の技”をデジタルデータとして吸収し、ロボットの動作として再現することを可能にした。
言語で思考する階層的AI:ChatGPTの頭脳を手術室へ
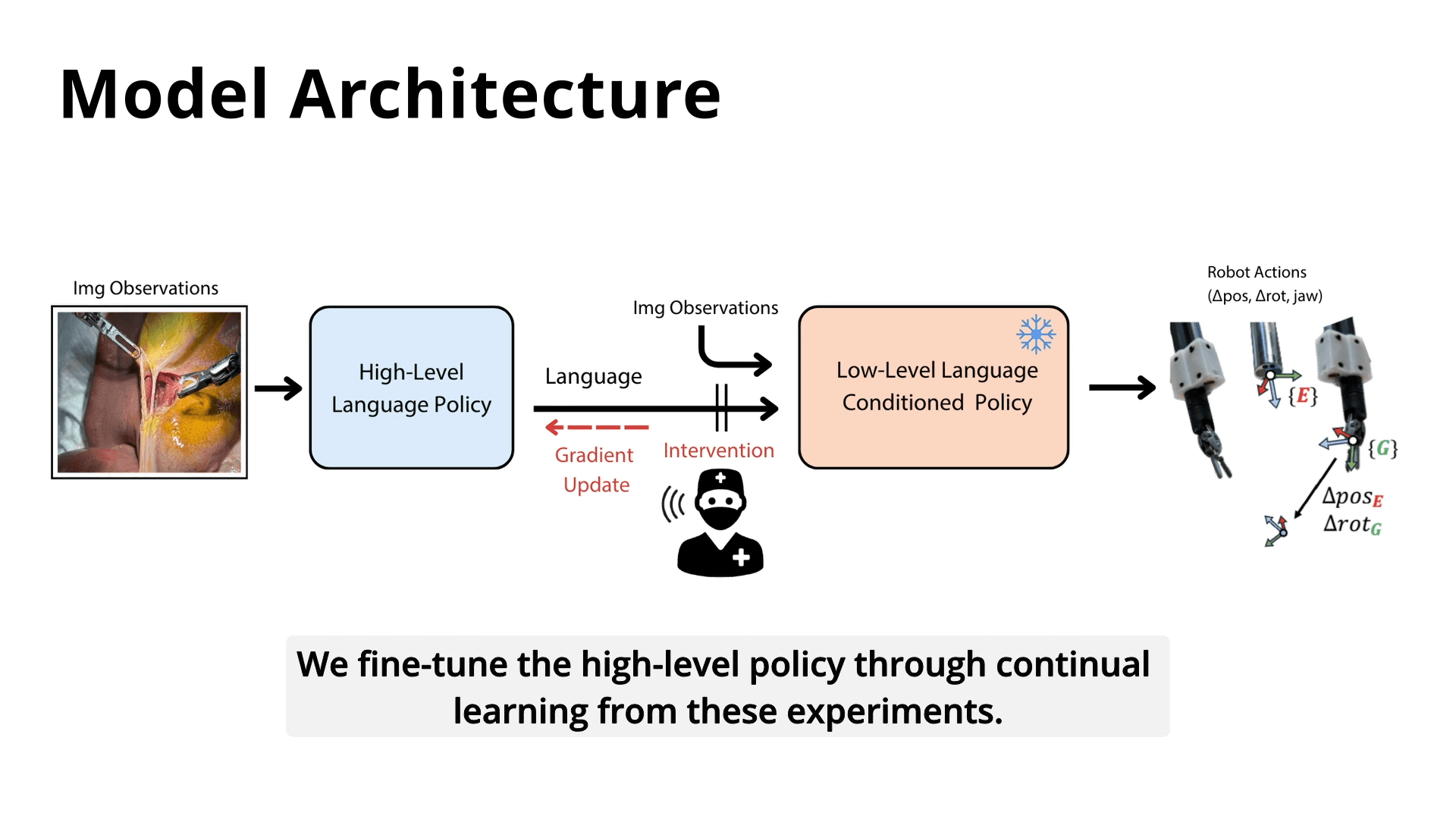
SRT-Hの「H」が示す階層的(Hierarchy) な構造が、このシステムのもう一つの核心だ。SRT-Hは、大きく分けて2つのAIから構成されている。
- 高レベル(HL)ポリシー: まるで「指導医」のように、手術全体の流れを理解し、現在の状況から次に行うべきタスク(例:「胆嚢管をクリッピングする」)を言語で決定する。この部分は、ChatGPTのような大規模言語モデルと同様のアーキテクチャを基盤としており、音声コマンドによる人間との対話も可能にする。
- 低レベル(LL)ポリシー: 「研修医」のように、HLポリシーから受け取った言語の指示に基づき、ロボットアームを動かすための具体的な軌道や動作を生成する。
この階層構造により、複雑な手術全体を「計画」と「実行」に分解し、より柔軟で知的な対応が実現した。論文の筆頭著者であるJi Woong “Brian” Kim氏は、「我々の研究は、AIモデルが外科的自律性に足る信頼性を持ちうることを示しています。かつては遠い未来と感じられていたことが、今や実証可能なものとなったのです」と、その意義を強調する。
従来ロボットとの決定的違い:ダヴィンチを超え、STARの先へ
現在、広く普及している手術支援ロボット「ダヴィンチ」は、あくまで外科医の操作を忠実に再現する遠隔操作システムであり、自律性は持たない。
一方、Krieger准教授らが2022年に開発した「STAR」は、豚の生体に対して自律的な縫合手術を成功させたが、手術部位に特殊なマーカーを付ける必要があり、事前に厳密に計画されたルートをたどるものだった。
SRT-Hは、これらの従来技術を大きく超越し、マーカーなしで、予期せぬ状況にもリアルタイムで適応しながら手術を完遂できる、真の「ステップレベル自律性」を達成した点で画期的と言える。
人間を超えるか?AIと外科医のパフォーマンス比較
研究チームは、SRT-Hのパフォーマンスを人間の専門外科医と比較する予備的な評価も行っている。その結果は、AIと人間の長所と短所を浮き彫りにした。
- 速度(Duration): 手術の完了までにかかる時間は、人間の方が速かった。
- 効率性(Trajectory Length): ロボットアームが移動した総距離は、SRT-Hの方が短かった。
- 滑らかさ(Mean Jerk): 動きの滑らかさ、つまり急な加減速の少なさは、SRT-Hが圧倒的に優れていた。
これは、SRT-Hが人間のような迷いや微調整なく、より効率的で無駄のない動きを実現していることを示唆している。現在はスピードで劣るものの、将来的には最適化が進むことで、人間の能力に匹敵、あるいは凌駕する可能性も否定できない。
医療の未来図:自律手術がもたらす光と影
SRT-Hの成功は、医療が直面する様々な課題に対する解決策となりうる。
世界的な外科医不足への福音
特に地方や発展途上国では、熟練した外科医へのアクセスが困難という深刻な問題がある。自律手術ロボットが普及すれば、外科医が遠隔で複数の手術を監督したり、ロボットが定型的な手術を担ったりすることで、外科医一人当たりの負担を軽減し、より多くの患者に質の高い医療を届けることが可能になる。
医療の標準化と地域格差の是正
世界最高峰の外科医の技術を学習したAIが手術を行えば、外科医の技量や経験による差をなくし、どこでも高いレベルの手術を受けられる「医療の標準化」が期待できる。これは、地域による医療格差の是正にも大きく貢献するだろう。
残された課題:倫理、法整備、そして「予期せぬ事態」への対応
一方で、実用化には多くの課題が残されている。英国の新聞『The Guardian』は、今回の実験が摘出された臓器で行われた点を指摘し、生体内で起こる呼吸による臓器の動き、予期せぬ出血、電気メスによる煙、体液によるカメラレンズの汚れといった、より複雑な要因にどう対応するかが今後の課題だと報じている。
また、万が一手術ミスが起きた場合、その責任は誰が負うのか(開発者、病院、AI自身?)、といった倫理的・法的な問題の議論と整備も不可欠だ。
次なる一歩:人間への臨床試験と未来へのロードマップ
この画期的な成果を受け、研究チームはすでに次なるステップを見据えている。英王立外科医師会も「大きな可能性を秘めた刺激的な進歩」と評価する一方、人間への応用には慎重な検討が必要だとの見解を示している。
Krieger准教授は、今後5年から10年以内に人間を対象とした臨床試験を開始することを目標としており、規制当局との協議も視野に入れているという。
今回の胆嚢摘出術の成功は、あくまで始まりに過ぎない。この模倣学習と階層的AIのフレームワークは、他の多くの外科手術にも応用可能であり、SRT-Hは今後、さらに多くの「術式」を学び、より万能な「AI外科医」へと進化していくだろう。
外科医の役割がロボットに取って代わられるのではなく、人間とAIが協調し、これまで不可能だったレベルの精度と安全性で手術を行う。そんな医療の新しい時代が、もうすぐそこまで来ている。
論文
- Science Rotobics: SRT-H: A hierarchical framework for autonomous surgery via language-conditioned imitation learning
参考文献
- Johns Hopkins University: Robot performs first realistic surgery without human help
- The Gurdian: Robot surgery on humans could be trialled within decade after success on pig organs