人類の技術史において、「歯車」ほど普遍的かつ不可欠な構成要素は存在しないといっても過言ではない。紀元前3000年の古代中国における戦車から、古代ギリシャのアンティキティラ島の機械、そして現代の精密ロボットに至るまで、動力の伝達は「固体同士の噛み合わせ」に依存してきた。
しかし今、その5000年に及ぶ工学の常識が、ニューヨーク大学(NYU)の研究チームによって覆されようとしている。
2026年1月13日、物理学誌『Physical Review Letters』に掲載された論文において、NYUの研究チームは、物理的な接触を一切持たず、流体の力だけで動力を伝達する「流体ギア(Fluid Gears)」の開発に成功したと発表した。金属の歯も、ベルトも、チェーンも存在しない。そこにあるのは、計算された流体の「流れ」だけなのだ。
この画期的な発明の物理学的メカニズム、従来の機械工学が抱えてきた弱点の克服、そしてソフトロボティクス分野にもたらす革命的な可能性についてを見ていこう。
「固体」から「流体」へ:発想の転換
従来の歯車は、金属やプラスチック、木材で作られた「歯」を噛み合わせることで回転運動を伝達する。この基本原理は、産業革命を経てもなお、本質的には変化していない。しかし、NYUクーラント数理科学研究所(Courant Institute of Mathematical Sciences)の准教授であり、本研究の主要著者であるLeif Ristroph博士らは、この「固体の呪縛」からの脱却を試みた。
彼らが着目したのは、空気や水がタービンを回す力である。自然界や既存の流体機械において、流体が物体を動かす現象は周知の事実だ。しかし、それを制御し、精密な「ギア(歯車)」として機能させることは、物理学的な挑戦であった。
実験のセットアップ:グリセロールと旋回流
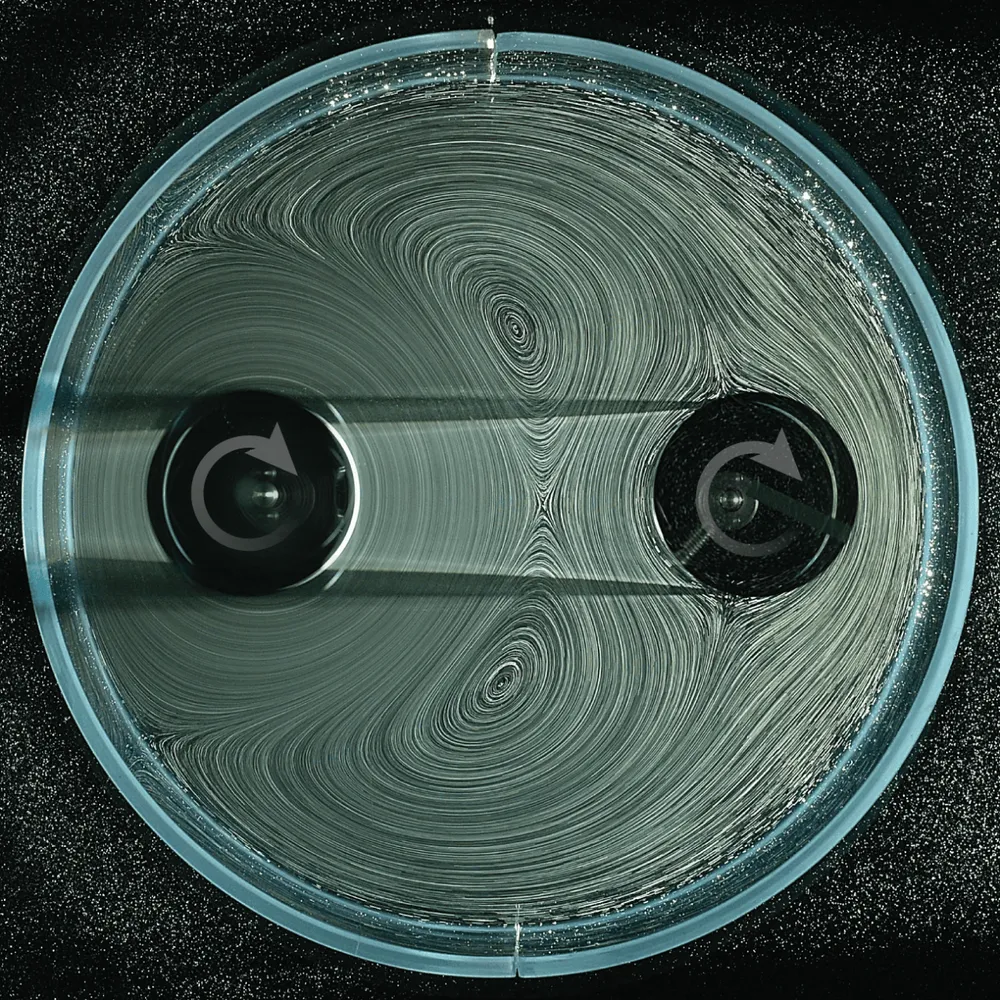
研究チームが構築した実験系は、一見するとシンプルである。水槽の中に粘度(粘り気)を調整した流体——水とグリセロールの混合液——を満たし、その中に2つの円柱(ローター)を浸す。
- アクティブ・ローター(能動側): モーターに接続され、外部からの動力で回転する円柱。
- パッシブ・ローター(受動側): 動力源を持たず、流体の動きに身を任せて回転する円柱。
この2つの円柱は物理的に接触しておらず、離れた位置にある。研究チームは、流体の動きを可視化するために微細な気泡を混入させ、アクティブ・ローターを回転させた際に生じる流体の挙動と、それがパッシブ・ローターに与える影響を詳細に解析した。
その結果、彼らが目撃したのは、流体がまるで「見えない歯車」のように振る舞う、驚くべき現象であった。
流体力学が生み出す「2つのモード」
この研究の白眉は、単に流体で物体が回ったということではない。ローター間の距離や回転速度を調整することで、動力伝達の「モード」を自在に切り替えられるという発見にある。これは、固体の歯車では不可能な芸当だ。
1. ギア・モード(Gear Mode):逆回転の伝達
2つの円柱が近距離に配置されている場合、アクティブ・ローターの回転によって生じた流体の渦は、2つの円柱の間で互いに押し合うような作用を生み出す。
具体的には、アクティブ・ローターが回転すると、その表面付近の流体が引きずられ、隣接するパッシブ・ローターの表面に対して「微細な流体の歯」のように作用する。この流体の圧力が、パッシブ・ローターを「逆方向」に回転させる。
これは、2つの通常の歯車が噛み合って回転する際、一方が時計回りなら他方は反時計回りに回るのと全く同じ挙動である。つまり、流体が物理的な歯の代わりを果たし、正確な動力伝達を実現しているのである。
2. ベルト・モード(Belt/Pulley Mode):同回転の伝達
一方、円柱同士の距離を離す、あるいは回転速度を特定の条件まで上げると、流体の挙動は劇的に変化する。
この条件下では、流体は個々の円柱の間で渦を巻くのではなく、2つの円柱全体を包み込むような大きなループ(循環流)を形成し始める。あたかも、2つのプーリー(滑車)に「見えないベルト」が掛けられたかのような状態だ。
この「流体のベルト」に引かれる形で、パッシブ・ローターはアクティブ・ローターと「同じ方向」に回転を始める。従来の機械工学において、歯車の回転方向を変えるには、間にアイドラー(遊び車)を挟むなどの物理的な構造変更が必要だったが、流体ギアでは単にパラメータを変えるだけで、回転方向すら制御可能であることが示されたのだ。
「摩耗ゼロ」と「ジャミング回避」:工学的優位性
この「流体ギア」の発明は、単なる物理学的な興味に留まらず、産業界が長年抱えてきた深刻な課題に対するソリューションを提示している。
摩耗と破壊からの解放
従来の機械式歯車には宿命的な弱点がある。それは「摩擦」と「摩耗」だ。金属同士が接触して動力を伝える以上、熱が発生し、部品は徐々に摩耗していく。また、過度な負荷がかかれば「歯」そのものが欠けたり、折れたりするリスクがある。
しかし、流体ギアには接触部品がない。摩耗する「歯」が存在しないため、理論上、動力伝達部における経年劣化は発生しないことになる。これは、メンテナンスフリーが求められる深海探査機や、宇宙空間での長期ミッションにおいて計り知れないメリットとなる。
異物による「ジャミング」の克服
さらに革新的なのが、異物に対する耐性だ。Ristroph准教授は次のように指摘している。
「通常の歯車は、歯が正確に噛み合うよう設計されなければならず、わずかな欠陥や間隔のズレ、あるいは一粒の砂が入り込むだけで、ジャミング(噛み込み停止)を起こしてしまいます」
砂漠地帯を走行する車両や、粉塵の舞う工場において、ギアボックスへの異物混入は致命的な故障原因となる。しかし、流体ギアの場合、もし砂粒や破片が流体中に入り込んだとしても、流体はその異物を避けて流れるだけである。システムがロックすることも、破損することもない。この「自己修復的」とも言える特性は、過酷な環境下での信頼性を劇的に向上させる。
ソフトロボティクスへの応用
この技術が最も期待される応用分野の一つが、ソフトロボティクスだ。
従来のロボットは、硬いモーター、硬いギア、硬いフレームで構成されていた。しかし、人間の生活圏で活動するロボットや、デリケートな物体(果物や生物の組織など)を扱うロボットには、柔軟性が求められる。
シリコンやゴムで作られた「柔らかいロボット」の中に、硬い金属製のギアボックスを埋め込むのは、構造的にも機能的にもミスマッチであった。金属部品は重く、柔軟な動きを阻害し、破損の原因となる「応力集中点」を生み出してしまうからだ。
柔軟な動力伝達システム
流体ギアを用いれば、動力を伝えるための「硬い部品」を排除できる。
- 完全なソフトマシンの実現: 駆動源(モーター)と作用点(関節など)の間を、流体を満たしたチューブで接続し、その中の流体の流れを変えることで、関節を曲げたり伸ばしたり、回転させたりすることが可能になる。
- 可変変速機の簡易化: 流体の粘度や流速を変えるだけで、ギア比(回転数の比率)を瞬時に変更できるため、複雑で重い変速機構を搭載する必要がなくなる。
論文の共著者であり、NYUおよびNYU上海の教授であるJun Zhang氏は、「我々は、噛み合う歯ではなく、流体を回転させることで噛み合う新しいタイプの歯車を発明した」と述べている。この言葉は、機械設計のパラダイムが「固体力学」から「流体力学」へと拡張されたことを象徴している。
機械工学の「再発明」
NYUの研究チームが示したのは、古代から続く「歯車」という概念の再定義だ。彼らは、動力を伝えるためには必ずしも固体同士が触れ合う必要はないことを証明した。
もちろん、現段階では実験室レベルの成功であり、高トルクの伝達効率や、流体の封入技術など、実用化に向けた課題は残されているだろう。しかし、「接触しない」「壊れない」「ジャミングしない」という特性は、これまでの機械工学がどうしても越えられなかった壁を突破する鍵となる。
かつてアンティキティラの機械が天体の運行を模倣するために精巧な青銅の歯車を用いたように、未来の機械は、血管の中を流れる血液のように、流体を循環させることで滑らかに、そして有機的に動くようになるのかもしれない。我々は今、硬くて冷たい機械が、柔らかく適応性のある存在へと進化する、その分岐点を目撃しているのだ。
論文
- Physical Review Letters: Hydrodynamic Spin-Coupling of Rotors
参考文献
- New York University: Scientists Put Teeth Into Water-Driven Gears