1985年、科学雑誌『Scientific American』の片隅に掲載された小さな広告が、ひとりのエンジニアの思考を刺激した。The Innovative Design Fundが、衣類やホームデコレーション向けの独創的なプロトタイプに対して最大1万ドルの支援を約束するという内容だった。当時ポラロイド社で電気エンジニアを務め、現在はマサチューセッツ工科大学(MIT)教授であるWilliam Freemanは、日常的に見慣れた二辺のファスナーを空間的な「三辺」へと拡張するアイデアを思いつく。複数の木製の歯をベルトで繋ぎ、専用のスライダーを引き上げることで、柔らかい素材を自立する強固な三角柱へと変貌させる装置である。この設計は、カバンを閉じるための道具を、物理的な空間を構築するためのスイッチへと飛躍させる可能性を秘めていた。
Freemanの提案は当時のコンテストでは採用を見送られ、特許を取得したのちも、複雑な形状を精密に大量生産する技術の不在により、彼のガレージの奥深くで長い眠りにつくことになった。それから約40年という歳月が経過した現在、ロボット工学や空間建築の世界では、形を自由に変えつつ必要なときには鉄骨のように振る舞う「可変剛性」のインターフェースが喉から手が出るほど求められている。
MITのComputer Science and Artificial Intelligence Laboratory(CSAIL)に所属するJiaji Li博士らの研究チームは、この歴史的な未完のプロジェクトに現代のデジタルファブリケーションの光を当てた。彼らが開発した「Y-zipper」は、特殊なソフトウェアによって自動設計され、市販の3Dプリンターで一体成形される。かつて手作業で削り出された木と布の試作品は、最新の計算幾何学と樹脂材料の融合によって、柔らかいひも状の構造から強固なロッドへと瞬時に変貌する全く新しい物理的メカニズムへと生まれ変わった。

ひも状の樹脂を骨格へ変える力学。三位一体のロック機構が仕掛ける物理のトリック
空間を素早く構築し、不要になれば即座に解体するという要求に対し、これまでの工学は常に妥協を強いられてきた。空気を送り込んで膨らませるインフレータブル構造は、展開速度こそ速いものの、内圧を維持し続けなければ強度が保てず、鋭利な衝撃にも弱い。折り紙を応用した剛性展開メカニズムや、金属パーツを組み合わせた既存のジップチェーンアクチュエータは、高い強度を誇る半面、製造コストが高く、直線的な動きしかできないという制約を抱えていた。Liらのチームは、これらの課題を「三辺の噛み合い」という純粋な機械的アプローチで突破した。
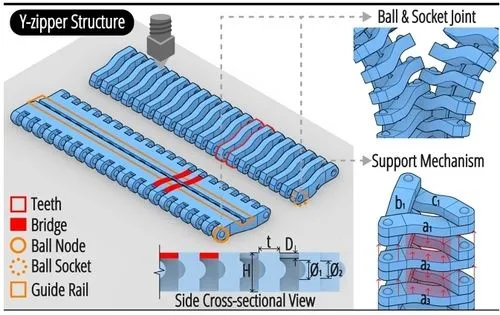
Y-zipperの中核にあるのは、3本の独立した柔軟なストリップ(帯)を、特殊な形状を持つスライダーで引き寄せて結合する仕組みである。従来の衣類用ジッパーが平面上の2枚の布を繋ぎ合わせるのに対し、Y-zipperは立体的な三角柱を形成する。この劇的な物性変化を支えているのが、ストリップ内部に組み込まれた3つの微細構造である。
第一の要素は、波打つようなプロファイルを持つ「歯(Teeth)」である。3方向から集まった歯が互いに乗り上げるように重なり合うことで、垂直方向に加わる圧縮荷重を石垣のように分散して受け止める。第二の要素は、これらの歯を束ねる「ブリッジ(Bridges)」と呼ばれる接続部である。未結合時にはストリップ全体を自由自在に曲げるためのヒンジとなり、結合時には隣り合う歯を強く引き寄せて引張荷重を直接受け止める。そして第三の要素が、各歯の上下に造形された極小の「ボールノードとソケット」である。立体パズルのようにカチリと嵌合するこの球体関節構造は、横方向から加わるせん断力を無効化し、外部からの複雑なねじれに対しても構造を安定させる。
これら三つの要素が連携した結果、力学的な強度は劇的な変化を遂げる。実験室での三点曲げ試験によれば、未結合のストリップ状態での曲げ剛性が約1.9×10^3 N mm^2であったのに対し、結合して三角柱を形成した状態では約3.1×10^5 N mm^2へと跳ね上がった。これは実に160倍以上の剛性増加を意味する。ブリッジの厚みを2.0mmに設定したモデルでは、わずか数十グラムの樹脂構造が18kgの重りによる圧力に耐え抜いた。さらに、独自のモーター機構による18,000回にも及ぶ過酷な開閉テストをクリアしており、樹脂の弾性変形を巧みに利用して応力を逃がす設計の優秀さを証明している。
平面のコードから三次元の骨格へ。アルゴリズムが描く4つの空間軌道
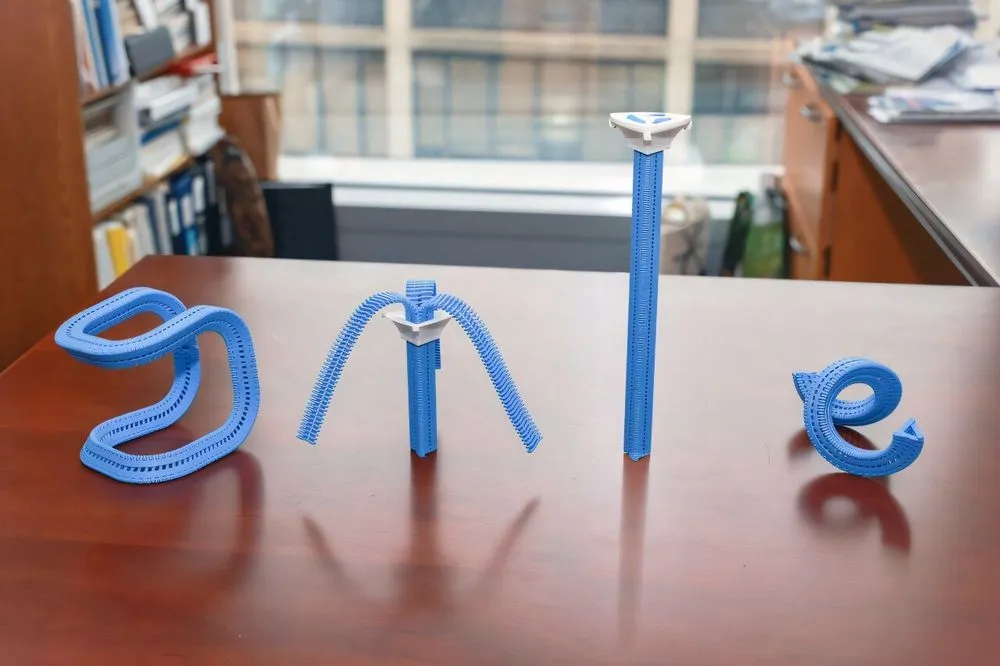
Y-zipperの真の価値は、それが単なる直線の棒を生み出すだけの技術ではない点にある。研究チームは、この機構をあらゆる立体造形に適用するため、専用の計算設計ツールを開発した。このツールは、ユーザーが画面上で描いた任意の3D曲面に対し、歯の形状やブリッジの配置を最適化し、平面の3Dプリンターで出力可能な展開図を自動で生成する。
この自動設計アルゴリズムは、4つの基本的な動きの集合体(Motion Primitives)に基づいている。「Straight(直進)」は最も単純な直線軌道を描く。「Bend(曲げ)」は、歯の厚みを左右で意図的に非対称にすることで、スライダーが進むにつれて自然とアーチを描くように構造全体を湾曲させる。「Coil(コイル)」は、曲げの運動にZ軸方向へのわずかなズレを加えることで、バネのような螺旋状の立体物を空中に組み上げる。そして「Screw(ねじれ)」は、歯の噛み合わせ角度にオフセットを設けることで、ドリルのように自転しながら伸びていく構造を生み出す。
ユーザーはこれらの基本要素をソフトウェア上でパズルのように組み合わせるだけで、思いのままの立体物を手に入れることができる。特筆すべきは、設計されたデータが熱溶解積層(FDM)方式の安価な3Dプリンターでそのまま出力できる点である。高価な金型や手作業による複雑な組み立てプロセスを一切排除し、出力した直後からスライダーを通すだけで実用的な可変構造が完成する。
| 構造変形メカニズム | 状態移行 | 展開速度 | 立体曲面の形成 | カスタマイズ性 | 自動駆動への適性 |
|---|---|---|---|---|---|
| インフレータブル(空気式) | 柔 ↔ 剛 | 速い | 限定的 | 困難 | コンプレッサーに依存 |
| トラス・折り紙構造 | 柔 ↔ 剛 | 遅い | 可能 | 可能 | 高度な多関節制御が必要 |
| 産業用ジップチェーン | 柔 ↔ 剛 | 極めて速い | 不可(直線のみ) | 困難 | 専用モーターに限定 |
| Y-zipper(本研究) | 柔 ↔ 剛 | 速い | 自由自在 | ソフトウェアで全自動 | 動的・静的モーターに両対応 |
身体拡張から巨大建築へ。即座に展開する物理空間の未来
自在に曲がる素材と強固な鉄骨の特性を併せ持つY-zipperは、極小の医療用ブレイスや巨大な建築物の骨組みなど、あらゆる物理スケールにおいて既存の常識を覆す力を持っている。
医療現場への応用例として提示されたのが、TFCC(三角線維軟骨複合体)損傷患者のためのリストブレイスである。手首の靭帯や軟骨を痛めた患者は、患部を固定する必要がある一方で、過剰な固定は筋肉の萎縮を招く。チームが開発したY-zipper内蔵の布製ブレイスは、日中の意識がある時間帯はファスナーを開けたままにして自然な手首の動きを許容する。睡眠時や激しい作業を行う際など、無意識の衝撃から手首を守りたい場面では、片手でスライダーを引き上げるだけでブレイス全体が硬いギプスへと変貌する。患者の生活リズムに合わせて即座に剛性をコントロールできるこの装具は、リハビリテーションの質を劇的に向上させる可能性を秘めている。
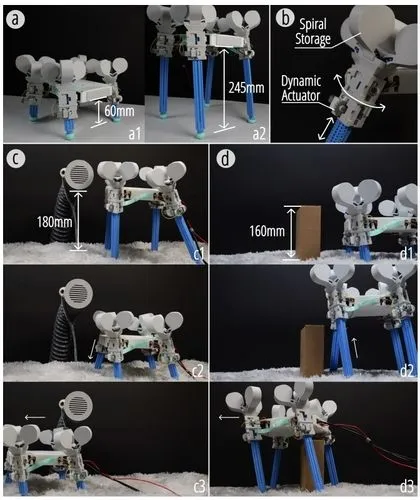
ロボット工学の分野でも、この特性は大きなアドバンテージを生む。研究チームは、4本の脚すべてにモーター駆動のY-zipperを組み込んだ四足歩行ロボットを開発した。ESP32マイクロコントローラーと軽量モーターを搭載した動的アクチュエータは、ジッパーの歯をレールに見立てて自ら這い上がりながら、瞬時に脚の長さを変化させる。高さわずか60mmの低い姿勢で障害物の下を潜り抜けた直後、3秒未満で脚を245mmまで伸ばし、高い段差を軽々と乗り越える。複雑な油圧シリンダーや多関節リンク機構を一切使わず、単純な樹脂の巻き取りと射出だけでこれほどの機動性を確保したことは、ロボットの軽量化と走破性の向上に新たな道筋を示すものである。
建築スケールでの実証実験も興味深い。一般的な市販のテントの骨組みを長さ1.5mのY-zipperに置き換えたところ、通常は骨組みを繋ぎ合わせて布に通す作業で4〜6分かかる設営時間が、手動操作でわずか1分20秒に短縮された。さらに4基のアクチュエータを並列で稼働させた自動展開テストでは、1分未満という驚異的なスピードでテントが自立した。解体作業も約40秒で完了し、骨組みはコンパクトなひも状に丸めてバックパックの隙間に押し込むことができる。
未踏のスケールと強度へ。次世代ファブリケーションが向かう先
現時点におけるY-zipperの性能は、使用する素材と製造装置の限界によっていくつかの制約を受けている。PLA(ポリ乳酸)やTPU(熱可塑性ポリウレタン)といった一般的な3Dプリント用樹脂は、優れた弾性を持つ反面、極端な高温や連続的な高負荷に晒される環境には適していない。例えば、幅25mmのジッパーを1m以上展開すると、樹脂自体の重みによる「たわみ」が発生し、計算通りの軌道を維持することが難しくなる。モーターの駆動力と自重のバランスを考慮すると、安定して開閉できる長さは現在のところ最大3m程度に留まっている。
また、出力解像度の限界も立ちはだかっている。FDMプリンターの特性上、歯の厚みを1.2mm、ストリップの幅を8mm以下に細線化すると、ボールノードとソケットの噛み合わせ精度が著しく低下し、意図せぬ脱落を引き起こす。体内への埋め込みデバイスやマイクロロボットへの応用を目指すには、SLA(光造形)方式などのより精密な積層技術を取り入れる必要がある。
しかし、これらの課題は今後の材料科学と加工技術の進歩によって突破され得る壁である。炭素繊維強化プラスチック(CFRP)や柔軟なチタン合金を用いた造形が可能になれば、重力によるたわみは解消され、その応用範囲は爆発的に拡大する。
この進化がもたらすのは、社会インフラとサプライチェーンの根本的な再定義である。宇宙産業においては、かさばる構造物を地上から打ち上げる必要がなくなる。軽量なストリップのロールのみを宇宙船に積載し、軌道上で巨大なハビタット(居住区)へと結合させることで、ロケットのペイロード制約を物理的に回避できる。また、災害支援の現場では、平時には倉庫の隙間に収まる数巻のコードが、有事にはわずか数分で堅牢な野戦病院の骨格へと変貌する。部材の「保管」と「輸送」にかかる莫大なコストが、この一本のファスナーによって文字通り圧縮されるのだ。
40年前の雑誌広告から始まり、暗いガレージの中で静かに時を待っていたWilliam Freemanの木製プロトタイプ。それは現代のエンジニアたちの手によってデジタルの息吹を吹き込まれ、物理世界を形作るための新しい言語へと進化した。空間を即座に縛り、そして解放するこの三辺の幾何学は、人類が長きにわたって苦心してきた「構築と解体」の歴史に、極めて軽快なピリオドを打とうとしている。