自動運転車は目覚ましい進歩を遂げてきた。車線を維持し、車間距離を保ち、慣れた道を難なく走行することができる。しかし、長年の開発を経ても、最も深刻な事故を引き起こす根本的な問題——稀だが危険な状況——への対処に苦慮している。
こうした「エッジケース」には、濡れた路面での急カーブ、急激な勾配変化、あるいは車両がグリップや安定性の物理的限界に近づく状況などが含まれる。実際の走行環境では、ドライバーと自動化システムがある程度共同で制御を担うケースが多く、そのような瞬間は人間の判断ミスや、急変する状況に自動化システムが対応しきれないことで生じることがある。
これらは滅多に起こらないが、発生した際の影響は深刻だ。車は1,000回の緩やかなカーブを完璧にこなせても、少し速度が出すぎた1回の急カーブで制御を失うかもしれない。
現在の自動運転システムは、こうした状況に確実に対応できるほど十分な学習を受けていない。データの観点から見ると、これらの事象は科学者が「ロングテール」と呼ぶものを形成している——統計的には稀であるが、その重要性は際立って高い。
現実世界のデータをさらに収集してもこの問題は完全には解決しない。なぜなら、危険な状況を意図的に作り出すことはコストがかかり、時間を要し、リスクを伴うからだ。これらのシナリオの多くは、現実の場では練習すること自体が危険すぎる。AIシステムがソフトウェアで対応できるか確かめるために、公道で意図的に車両を衝突寸前の状態に追い込むわけにはいかない。訓練中に極端な状況をほとんど経験していないAIシステムは、実際にそれが起きたときにうまく対処できる可能性が低い。
現在の自動運転車では、何か問題が起きた際に介入できるよう、管制センターに人間が常駐していることが多い。しかし、完全な無人運転を実現するためには、研究者がAIシステムを高リスクな状況に対応できるよう効果的に訓練する方法を見つける必要がある。
ダブリンシティ大学とバーミンガム大学の共同研究チームは、このギャップに取り組んできた。
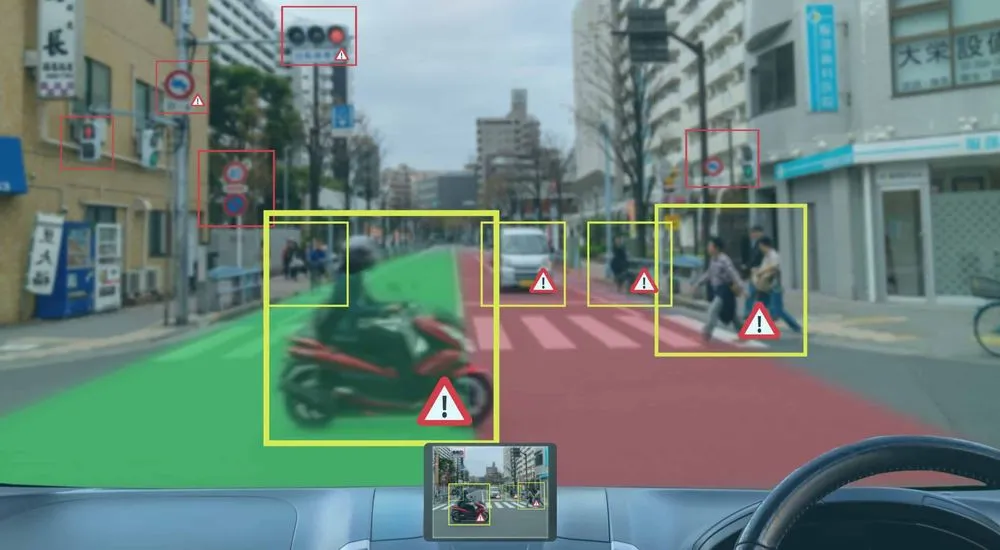
私たちは、生成AIを活用して稀な高リスクの運転シナリオを安全に作り出す、バーチャル「プルービンググラウンド(試験場)」を開発した。これにより、誰かを危険にさらすことなく、車両がそうした状況から学習することが可能になる。稀なイベントが自然に発生するのを待つのではなく、AIモデルに対して、車両を物理的限界近くまで追い込むシナリオを含む、現実的かつ挑戦的な運転シナリオをオンデマンドで生成するよう学習させることができる。
安全に練習する
このシステムで使用される生成AIは、実際の運転データから学習し、新しい現実的なシナリオを生成するよう設計されている。重要なのは、単に典型的な道路や速度を再現するのではない点だ。
人間のドライバーと自動化システムの双方を試練にかける形で、急カーブ、急勾配、高速走行といった最も過酷な状況を意図的に組み合わせて焦点を当てる。これにより、シミュレーターの外に出ることなく、訓練中に車両が経験できる状況の幅を広げることができる。
実質的に、車は危険な状況を安全に、繰り返し、体系的に「練習」できることになる。ただし、私たちの研究の目標は、人間のドライバーを完全に置き換えることではない。むしろ、車とドライバーが互いを補い合うパートナーシップである「人間=機械の協調運転」に焦点を当てている。
このバーチャルシステムは、訓練中に自動運転車が経験できる状況の幅を広げる。Gerry Matthews
人間は直感・予測・慣れない状況への適応に優れている。一方、機械は素早い反応と精密な制御を得意とする。協調運転は、これらの強みを組み合わせることを目指す。このシステムでは、リスクに応じて制御が継続的に調整される。
道路が直線で安全なときはドライバーが主体的に操作するが、システムが急カーブをやや速すぎる速度で進入しようとしているなどの高リスク状況を検知すると、車両を安定させるために自動補助の度合いをスムーズに引き上げる。重要なのは、これが突然の制御移転ではない点だ。移行は段階的かつ適応的であり、唐突さではなく自然さを感じさせるよう設計されている。
システムの評価は、純粋なシミュレーションにとどまらなかった。私たちはドライバー・イン・ザ・ループプラットフォームを使用した。これは実際の人物が高忠実度の運転シミュレーターに座り、リアルタイムでAIとやり取りする仕組みである。結果は励みになるものだった。経験の浅いドライバーが最も恩恵を受けた——複雑な曲がりくねった道路で苦労すると、システムが適切なタイミングでサポートを提供し、制御を失うリスクを軽減した。
同時に、安全な走行中は不必要な介入を避けたため、ドライバーは制御を奪われるのではなく、より積極的に関与していると感じやすかった。全体として、この適応的アプローチは、固定的または過度に保守的な制御戦略と比べて、より安全でスムーズな走行をもたらした。また、人間のドライバーとAIの双方が、極端な道路状況への対処能力を向上させることも可能にしている。
自動運転車は通常走行の対応能力で評価されることが多いが、社会からの信頼は最終的に、何かが起きたときの振る舞いにかかっている。生成AIを活用して稀だが重大なシナリオで車両を訓練することで、弱点を早期に露呈させ、意思決定を改善し、現実の世界により備えたシステムを構築することができる。
同様に重要なのは、人間をループ内に留めることで、ドライバーを完全に置き換えるのではなく支援する自動化を設計できる点だ。完全無人運転車の実現にはまだ時間を要するかもしれないが、こうしたよりスマートな訓練システムは、今日の道路における人間運転車と自動運転車の双方の安全性を高めることで、そのギャップを埋める一助となりうる。


