熱いやかんや鋭利な刃物に誤って触れた瞬間、私たちは思考するよりも早く手を引っ込める。これは、脳が痛みを認識する前に、脊髄レベルで処理される「反射」と呼ばれる生存本能的なメカニズムによるものだ。このコンマ数秒の反応速度が、重篤な火傷や怪我から私たちの身を守っている。
これまで、人間型のロボット(ヒューマノイド)には、この「反射」という概念が欠落していた。しかし、中国の研究チームが開発した新たな人工電子皮膚は、ロボットに触覚を与えるだけでなく、「痛み」を感知し、CPU(中央演算処理装置)を介さずに瞬時に回避行動をとる能力を付与することに成功した。これは、ロボットが実験室を出て、家庭や病院とい人間と共存する環境へ進出するための、極めて重要なマイルストーンとなる技術である。
従来型ロボットの限界と「反射」の欠如
現代のロボット工学において、環境との物理的な接触をどう処理するかは常に大きな課題であった。従来のロボット皮膚技術の多くは、単なる「圧力パッド」の域を出ていない。それらは接触された事実や圧力の強さを検知することはできるが、その情報が何を意味するのか、即座にどう対処すべきかを判断する能力は皮膚自体には備わっていない。
中央処理による致命的なラグ
既存のシステムでは、指先のセンサーが刺激を受け取ると、そのデータは長い経路を辿ってロボットの「脳」にあたる中央処理装置(CPU)へと送信される。CPUは膨大なプログラムと照らし合わせてデータを解析し、適切な反応(例:手を引く)を決定し、再び長い経路を通じて腕のモーター(アクチュエータ)へ指令を送る。
このプロセスは、コンピュータの速度をもってしても、物理的な損傷を防ぐための「反射」としては遅すぎる場合がある。特に予測不可能な現実世界において、このわずかなタイムラグ(遅延)は、ロボット自身の破損や、あるいは接触した人間への危害につながるリスクを孕んでいる。
NRE-skin:生物学的神経系を模倣したアーキテクチャ
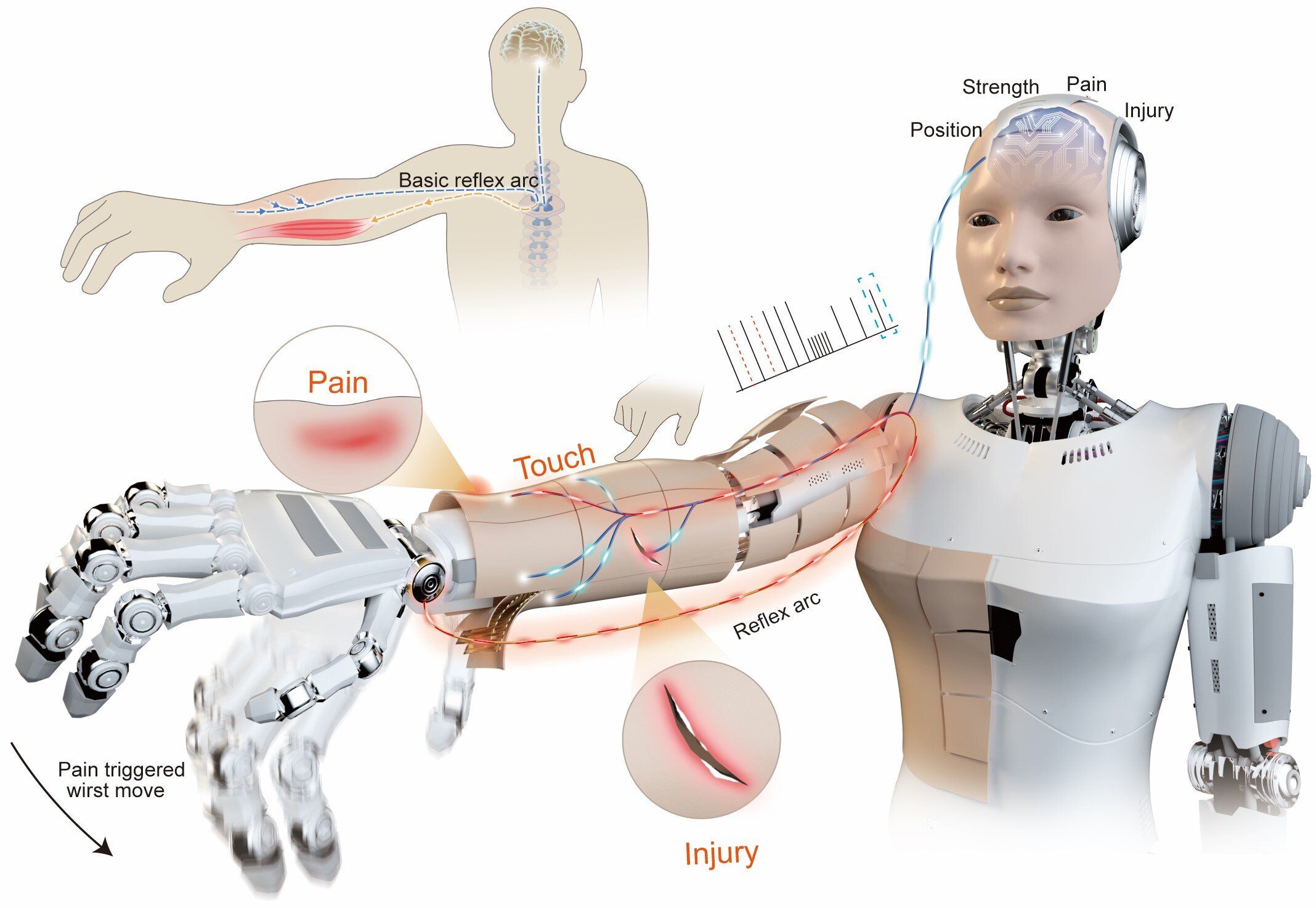
中国の研究チーム(香港城市大学の研究者らを含む)が開発した「NRE-skin(Neuromorphic Robotic E-skin)」は、この課題に対して、人間の神経系の構造を模倣(ニューロモルフィック)するアプローチで解決を試みた。
この人工皮膚は、単なるセンサーシートではなく、情報のエンコーディング(符号化)とローカルな信号処理を行う高度な回路システムだ。その構造は主に4つの層から成り、最上層は人間の表皮のように内部を保護し、その下層には圧力センサーと、人間の神経のように振る舞う回路が埋め込まれている。
スパイク信号による情報の伝達
人間の神経細胞(ニューロン)は、情報を「スパイク」と呼ばれる電気パルスの列として伝達する。NRE-skinはこの原理を採用しており、アナログな圧力情報をデジタルな処理に適したスパイク信号へと変換する。
- 圧力の強度(インテンシティ):
生物の神経と同様に、NRE-skinは圧力の強さをスパイクの「頻度(周波数)」で表現する。圧力が強ければ強いほど、単位時間あたりに発生する電気パルス(スパイク)の数は多くなる。 - 位置とIDの特定:
スパイクの頻度が強さを表す一方で、スパイクの「形状」「大きさ(振幅)」「持続時間」といったその他の特性は、どのセンサーが反応しているかを示す識別子(バーコードのような役割)として機能する。これにより、システムはどこに触れられたかを正確に特定できる。
「痛み」の閾値と局所的な反射ループ
NRE-skinの最大の革新性は、CPUをバイパス(迂回)する「局所的な反射機能」の実装にある。これは、人間の脊髄反射を工学的に再現したものと言える。
通常の触覚と「痛み」の選別
日常的な接触(例えば、物を掴む、撫でるなど)の場合、皮膚からのスパイク信号は通常通りCPUへと送られ、物体認識や把持力の調整といった高度な処理に利用される。しかし、皮膚に加えられる圧力が、あらかじめ設定された「痛み」の閾値(人間の痛覚レベルを参考に設定されている)を超えた場合、システムはこれを「損傷のリスクあり」と判断する。
瞬時の回避行動
「痛み」と判定されるほどの強い圧力が加わると、皮膚システムはCPUでの処理を待つことなく、高電圧のスパイク信号を直接アクチュエータ(モーター)へと送信する。これにより、ロボットは「考える」前に即座に腕を引っ込めるなどの回避行動をとることが可能となる。
実験では、このNRE-skinを装着したロボットアームが、過度な圧力に対して瞬時に反応して身を守る様子や、接続されたロボットの顔が圧力の強さに応じて表情を変える(痛がるような表情を見せる)様子が確認されている。これにより、ロボットは自身のハードウェアを守るだけでなく、人間との接触時に過度な力を感知して即座に停止するなど、より安全で「共感的」なインタラクションが可能になる。
自己診断とモジュラー式修復システム
生物の皮膚は、常に脳と繋がっており、感覚がない(麻痺している)場合は異常として認識される。NRE-skinはこの「常時接続性」も模倣している。
生存確認信号(Heartbeat Signal)
たとえ何も触れていない状態であっても、NRE-skinの各センサーは75〜150秒ごとに微弱な「生存確認パルス」をCPUに送信し続けている。これは皮膚からの「異常なし」という報告である。もし、皮膚が切断されたり深刻な損傷を受けたりしてこの信号が途絶えると、ロボットは即座に「どの部分の感覚が失われたか(損傷したか)」を検知し、オペレーターに警告を発することができる。
マグネットによる容易な交換
ロボットが過酷な環境で活動すれば、皮膚の損傷は避けられない。NRE-skinはメンテナンス性にも優れており、全体を張り替える必要はない。皮膚は小さなパッチ状のモジュール(構成単位)に分かれており、それぞれが磁気(マグネット)によって接続されている。
この設計はレゴブロックに似ており、損傷したセクションを「パチッ」と取り外し、新しいモジュールをはめ込むだけで修理が完了する。磁気コネクタが自動的に配線とデータリンクを確立し、新しいパッチのIDをシステムに登録するため、複雑な配線作業は不要である。
科学的意義と今後の展望
今回開発されたNRE-skinは、現時点では「圧力」の検知に特化しており、温度や化学刺激なども感知できる人間の皮膚の完全な再現には至っていない。また、「ニューロモーフィック」という言葉が使われているものの、生物学的な神経構造を完全にコピーしたわけではなく、あくまでその機能的原理(情報のエンコーディングや反射アーキテクチャ)に啓発されたシステムである点には留意が必要である。
ニューロモーフィック・コンピューティングとの統合
しかし、この技術が持つ可能性は計り知れない。特に注目すべきは、この皮膚が生成する「スパイク信号」が、次世代のAIハードウェアである「ニューロモルフィック・チップ(スパイキング・ニューラル・ネットワークをハードウェアレベルで実行する省電力プロセッサ)」と高い親和性を持つ点である。
従来のコンピュータが得意とするデジタル信号処理ではなく、神経系のようなスパイク信号を直接処理できるチップとNRE-skinを組み合わせることで、極めて低い消費電力で、人間に匹敵する反応速度と適応能力を持つロボット制御システムが実現する可能性がある。
人間とロボットの共生に向けて
Tesla社のOptimusをはじめ、家庭や職場で人間と共に働くヒューマノイドロボットの開発競争が激化している。そのような環境において、ロボットが「痛み」を知ることは、逆説的だが「安全性」の保証となる。自分自身が傷つくことを避ける能力を持つロボットは、結果として、周囲の人間を傷つけるリスクも最小限に抑えることができるからだ。
今回の成果は、ロボットが単なる「プログラム通りに動く機械」から、環境を直感的に感じ取り、生物のようにしなやかに適応する存在へと進化するための、重要な技術的基盤となるだろう。
論文
参考文献